






















Transbot powered by Nvidia Jetson NANO 4GB Subkit, Lidar, HD camera and depth camera
Original price was: 9.787 lei.7.990 RONCurrent price is: 7.990 lei.
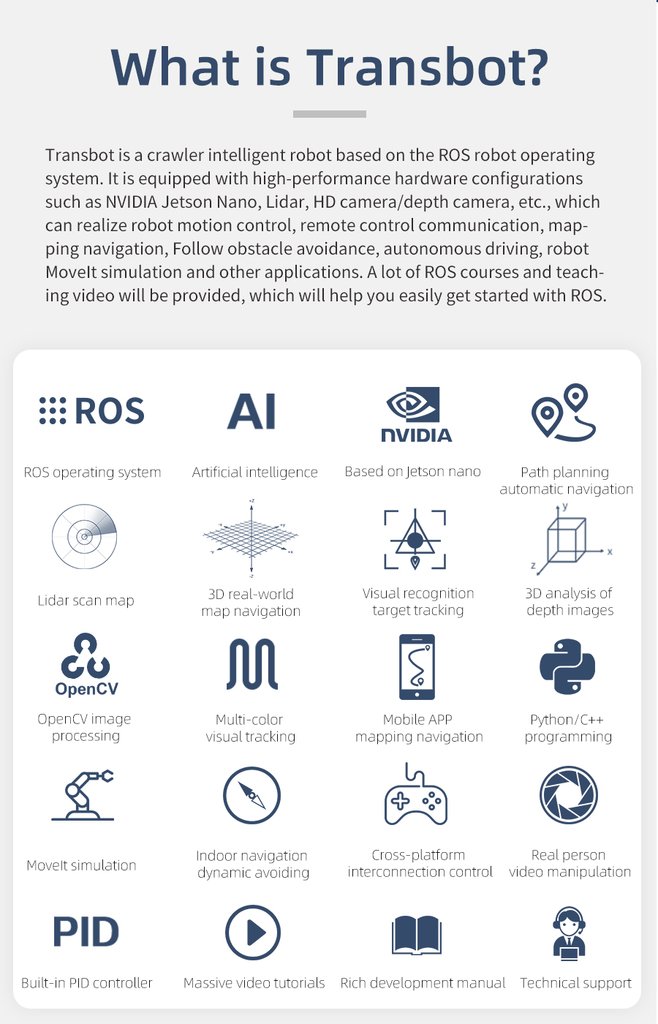
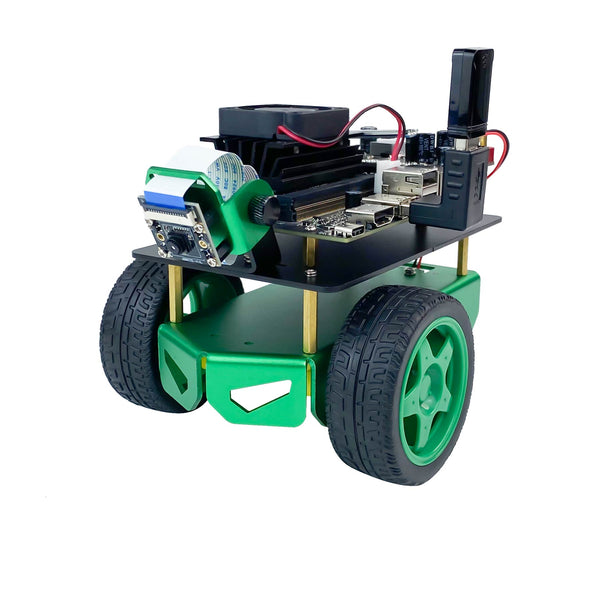
Transbot is a crawler off-road robot based on ROS(robot operating system) and Python programming, which is designed for ROS enthusiasts and robot players.
In stock (can be backordered)
Transbot is a crawler off-road robot based on ROS(robot operating system) and Python programming, which is designed for ROS enthusiasts and robot players. It is equipped with high-performance hardware configurations such as nVIDIA Jetson Nano Subkit, Lidar, HD camera/depth camera, etc., which can realize applications such as robot motion control, remote communication, mapping navigation, following-avoiding, autopilot and robotic arm MoveIt simulation. A lot of teaching course documents and videos to help you get started with ROS easily.
Features
Crawler style, support for quick assembly robotic arm:
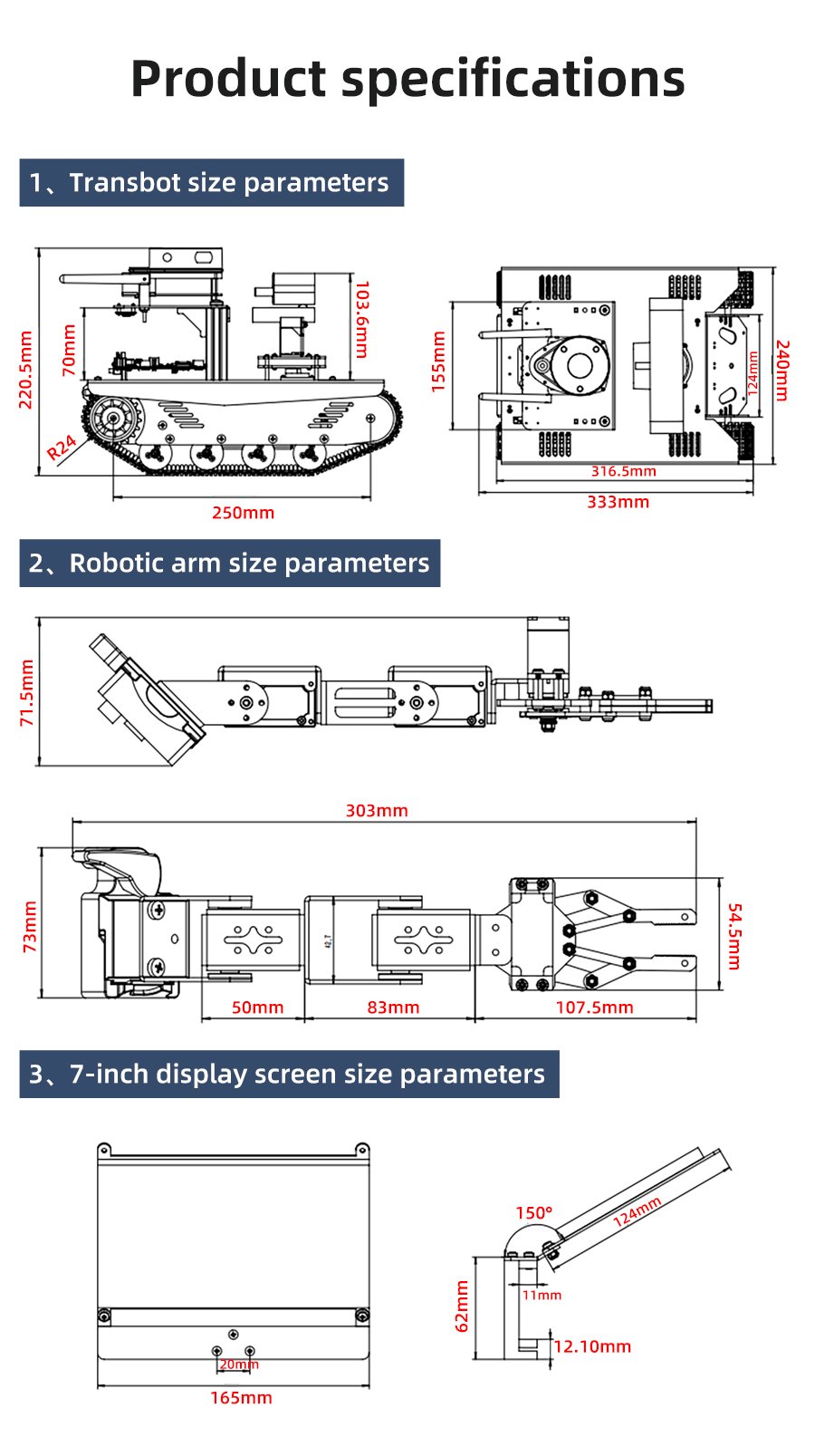
The whole car is made of green aluminum alloy oxide material, supports install robotic arm, 2DOF camera pan/tilt, 7-inch screen and so on. Users can debug the car anytime and anywhere.
Professional hardware configuration:
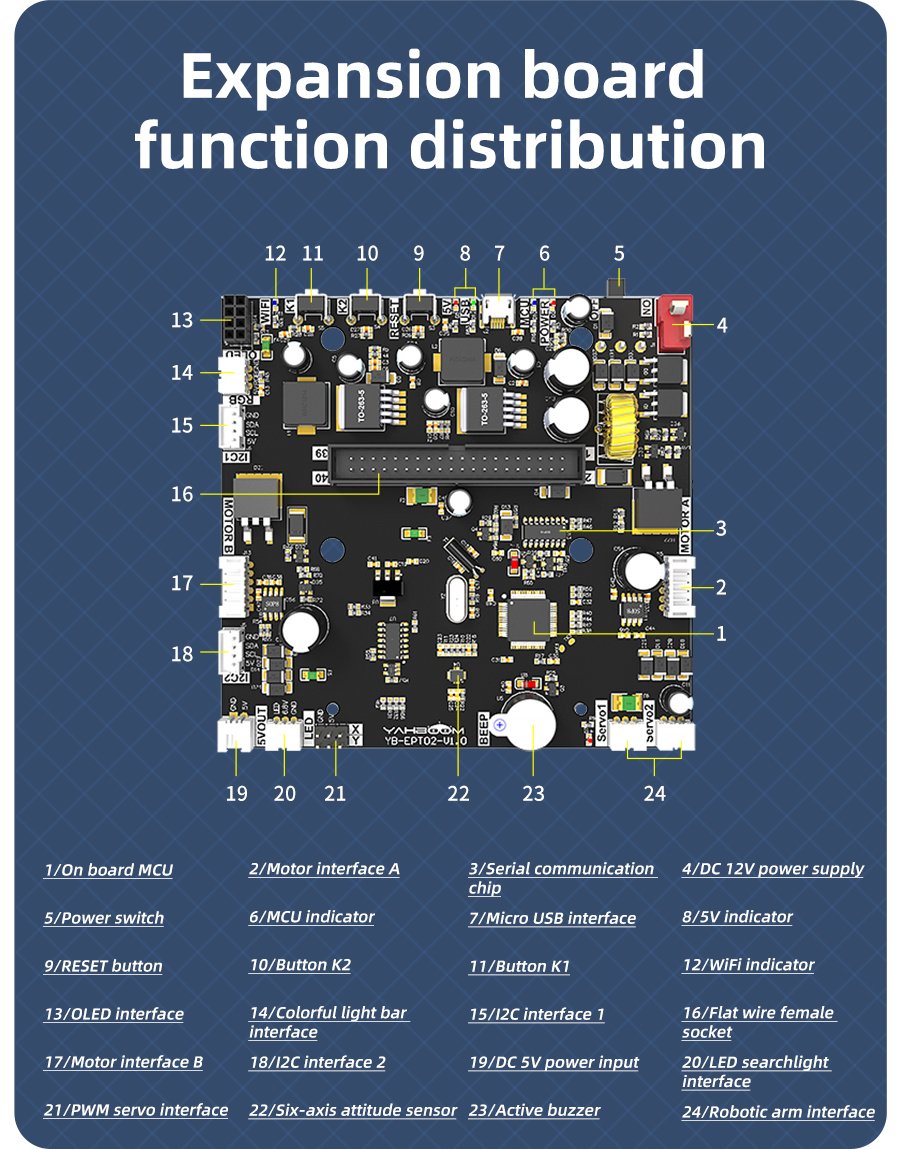
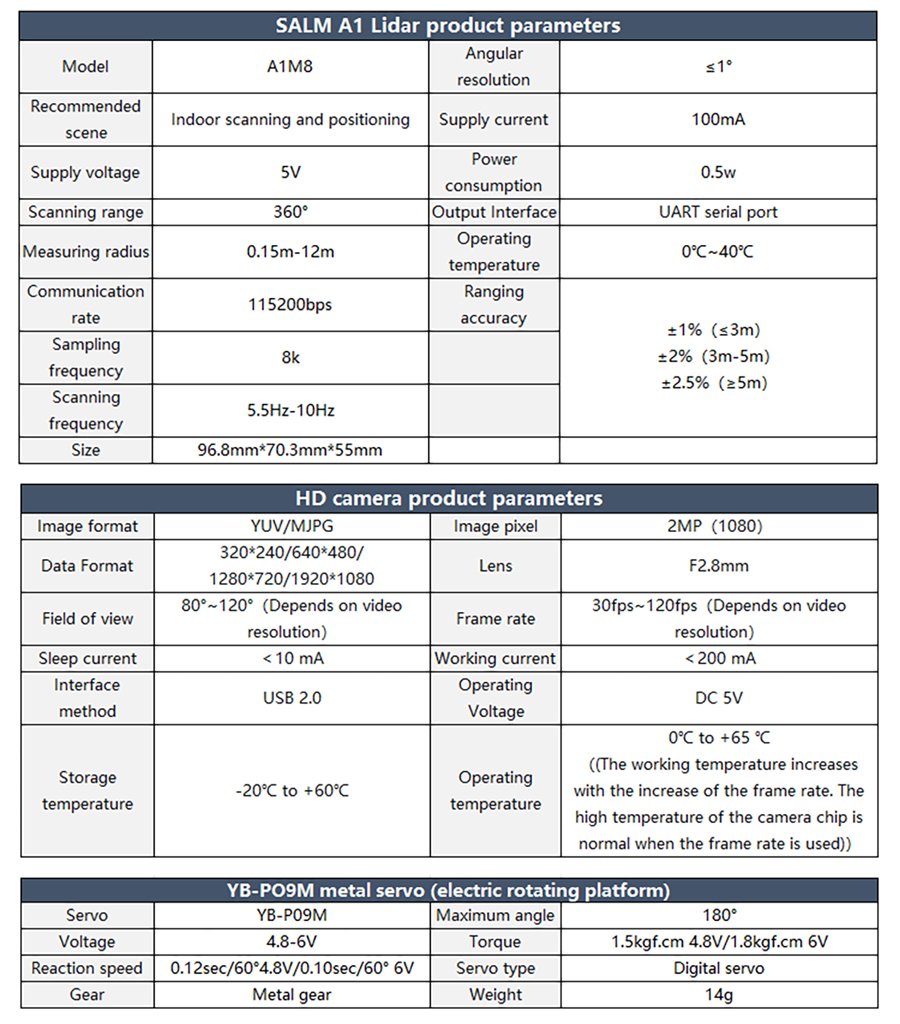
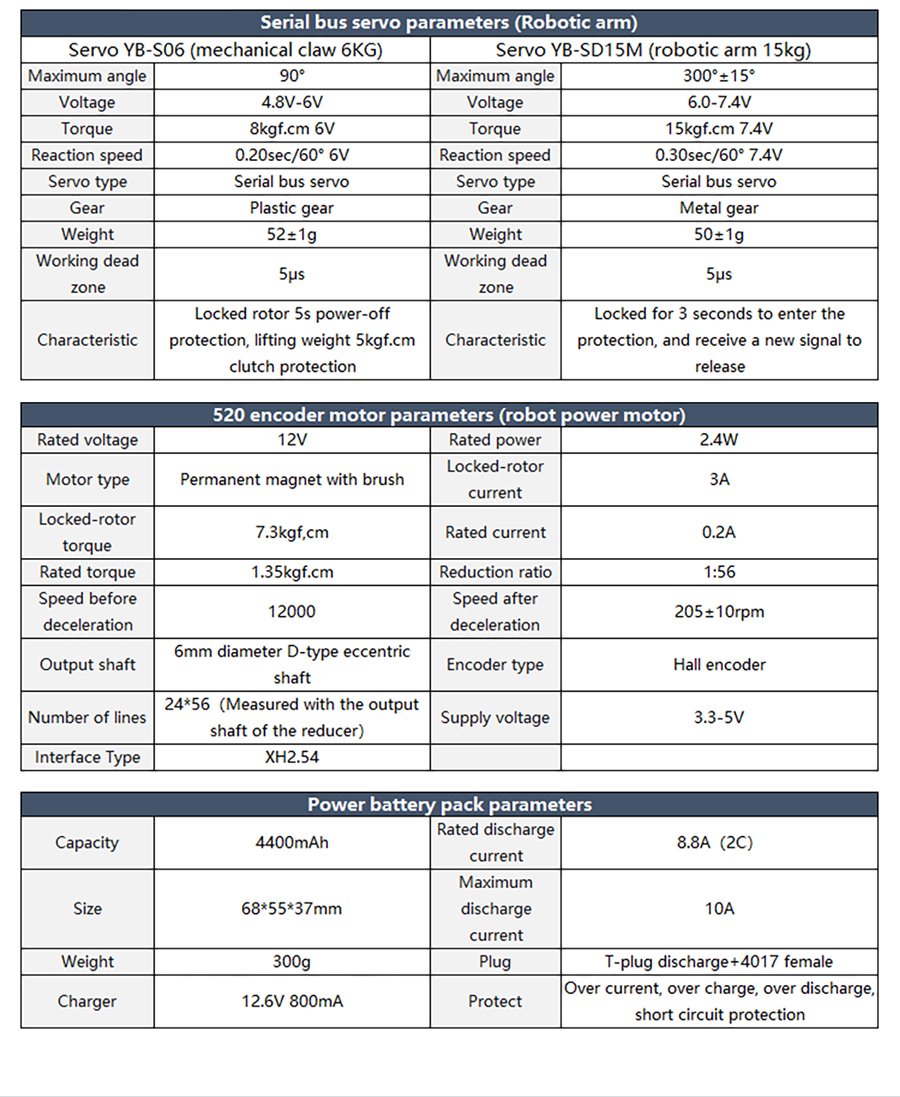
SLAM lidar, HD camera/depth camera, powerful coding gear motor, metal servo, and Yaboom robot expansion board, etc.
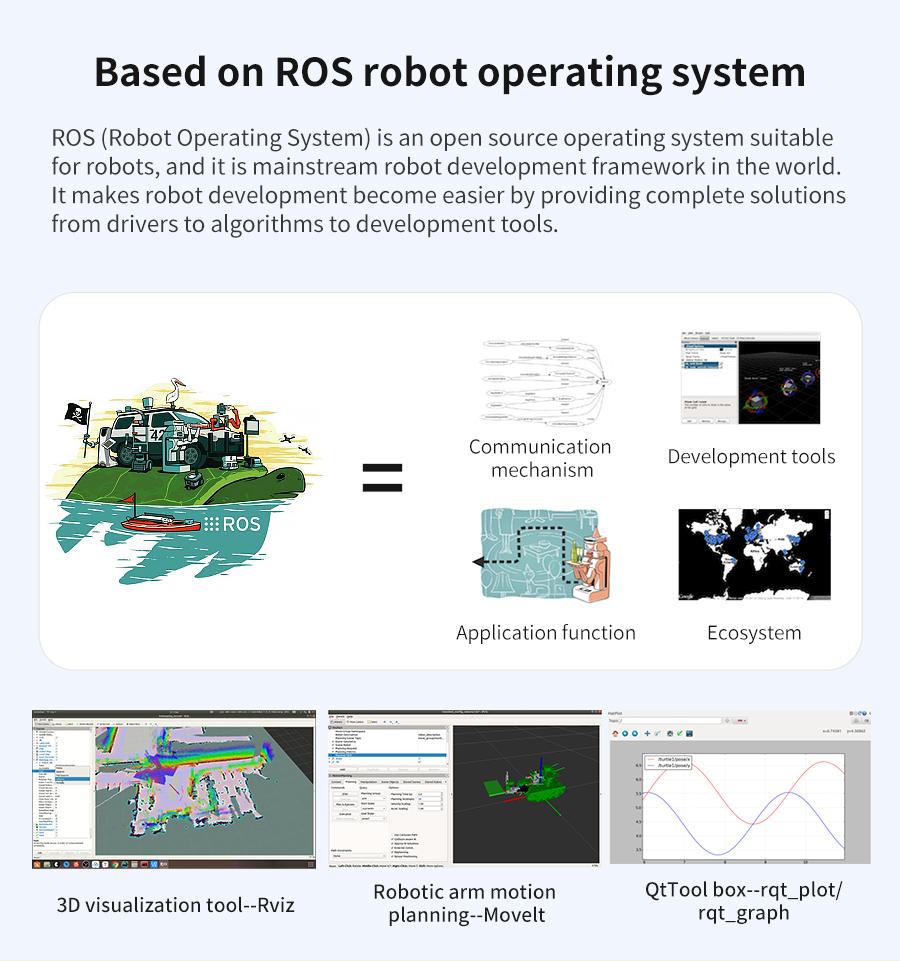
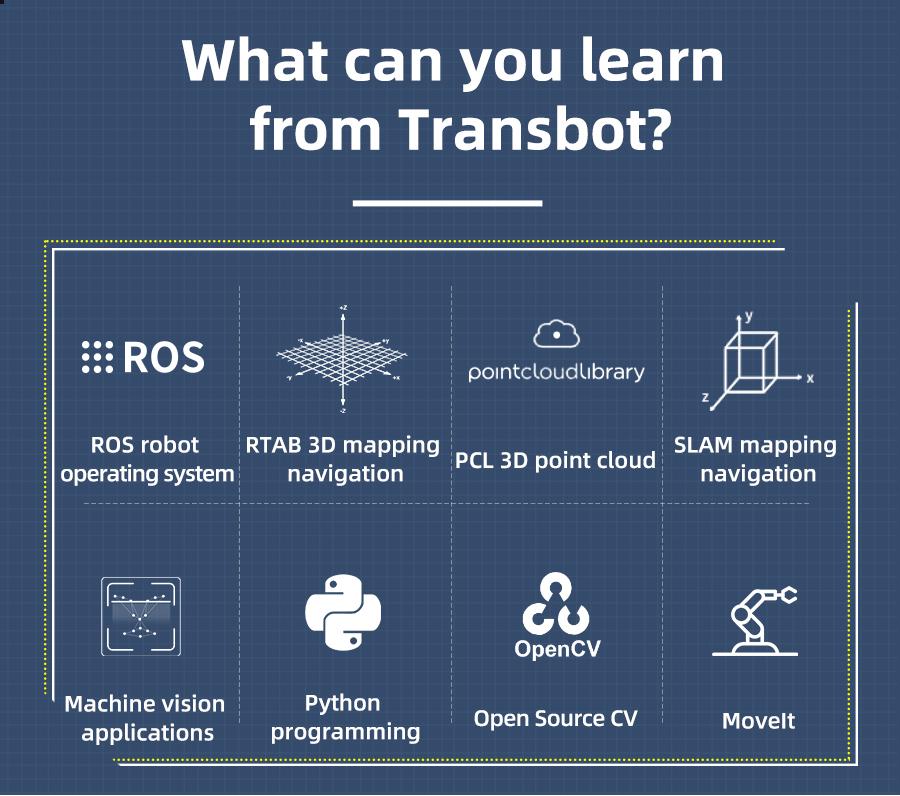
Based on ROS (robot operating system) and Python programming:
We cleverly used Rviz, Movelt, and Qt toolboxes in robot operating system to realize the joint control of the robotic arm Movelt simulation and the real machine.
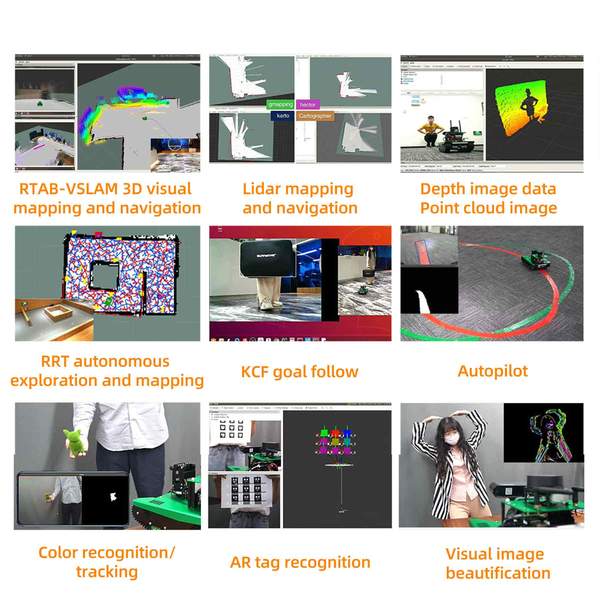
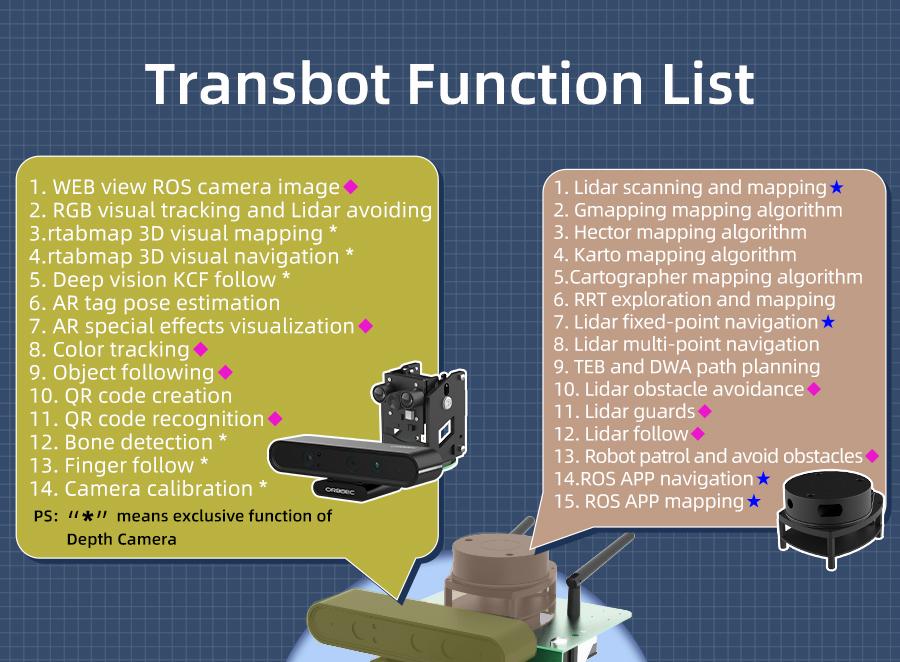
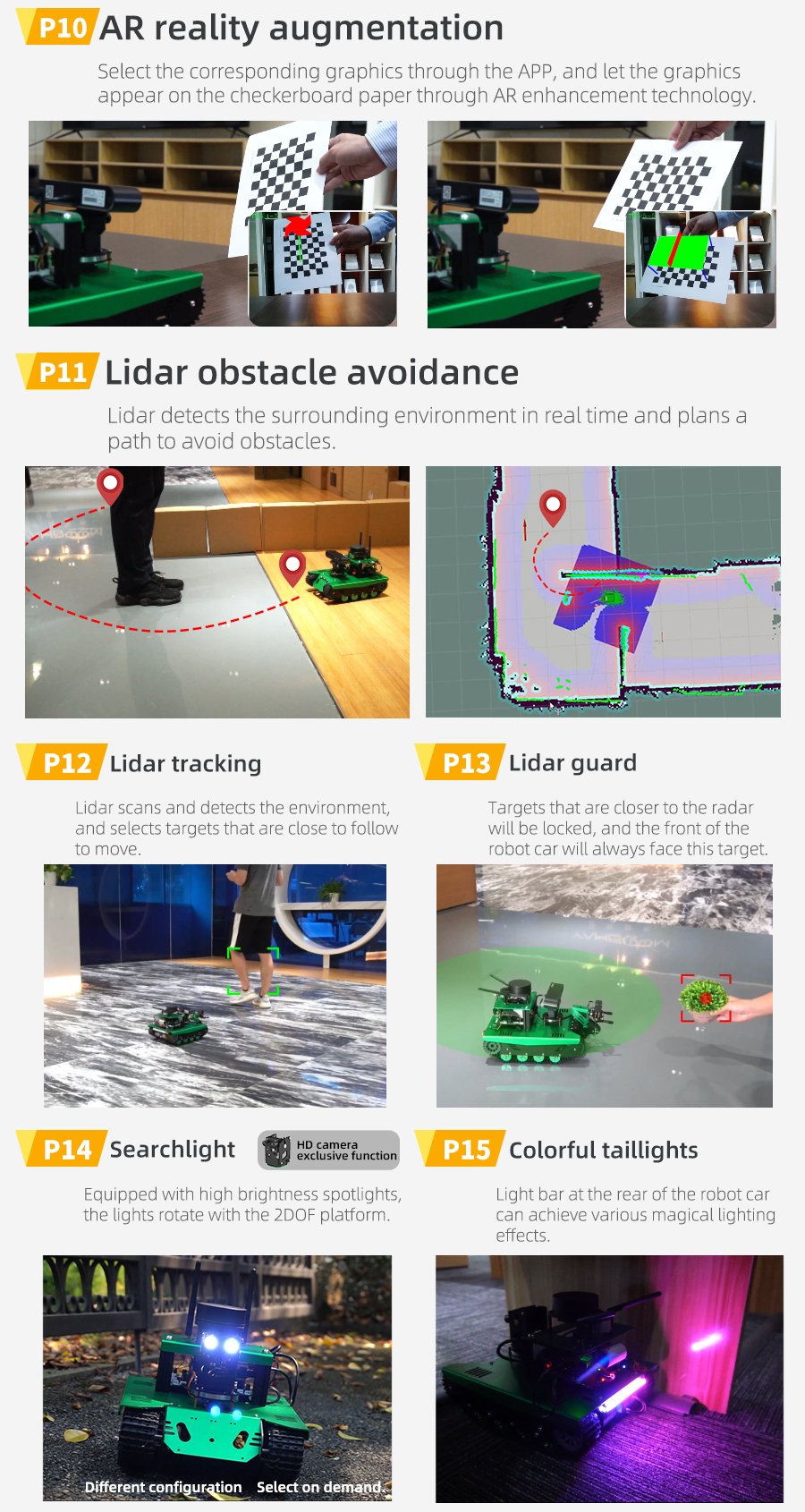
AI functions:
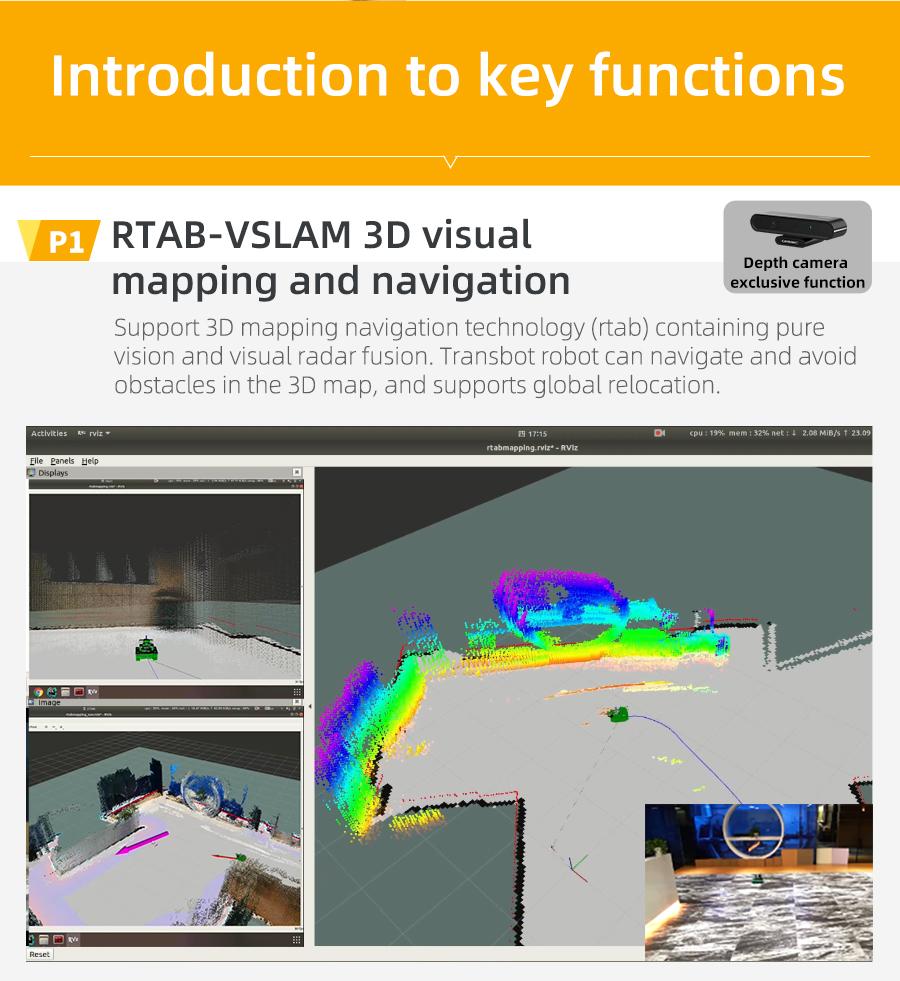
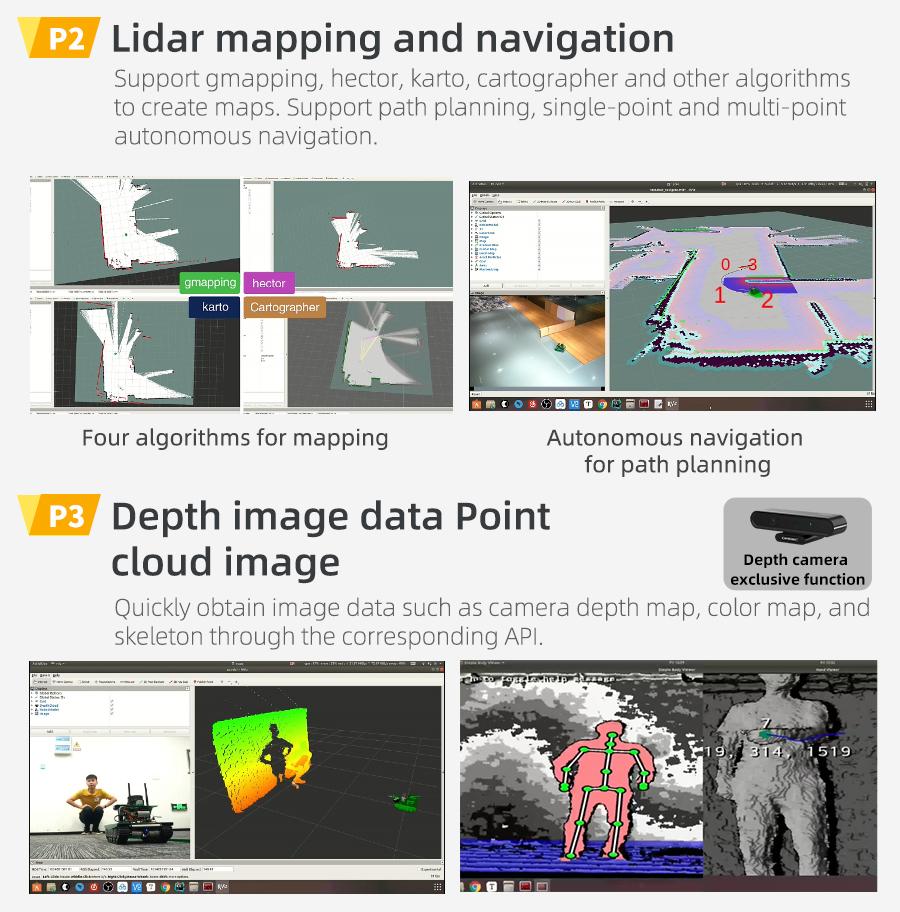
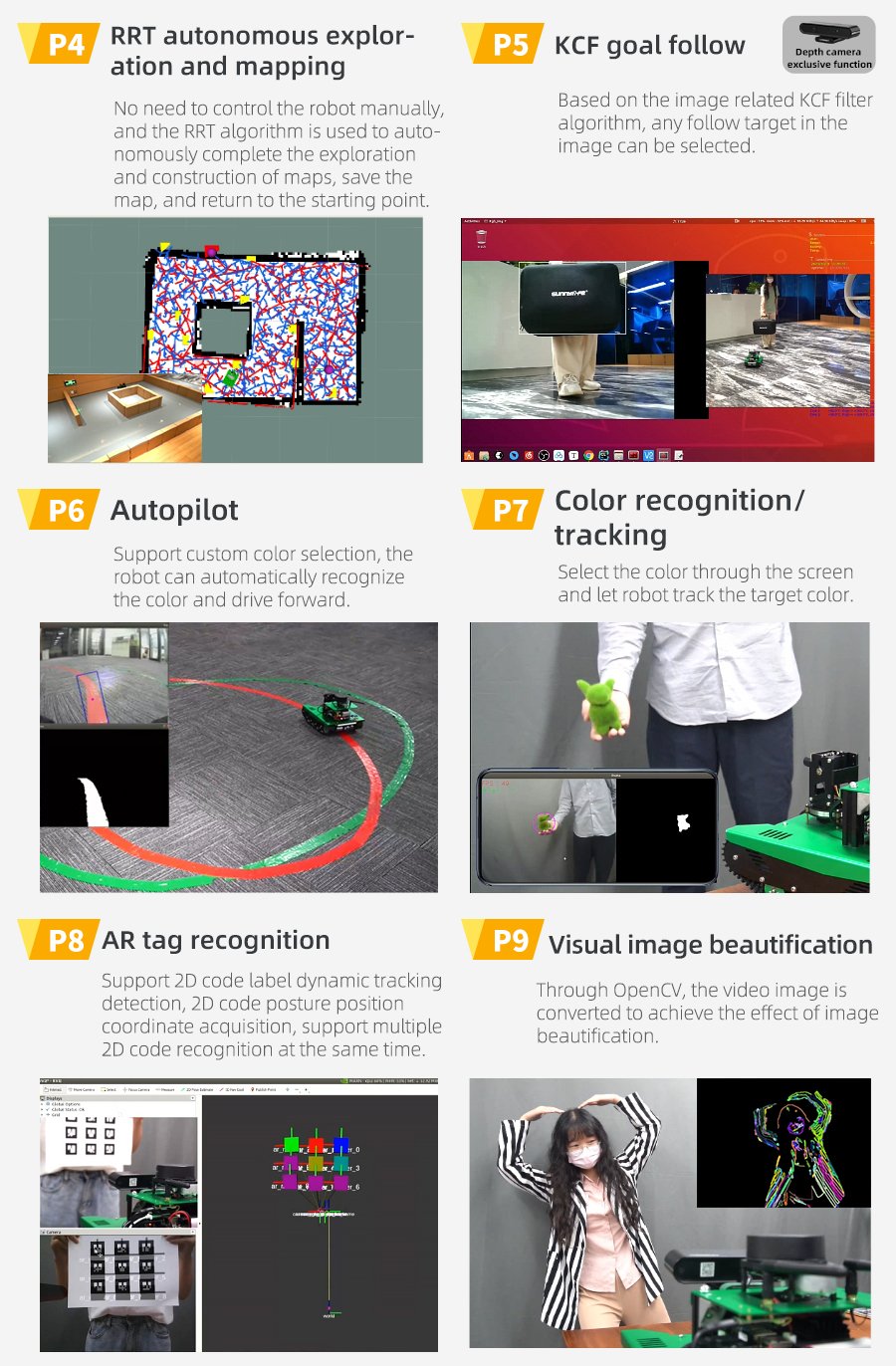
Lidar avoiding, fixed-point navigation, bone detection, finger following, camera calibration, 3D visual mapping navigation, etc.
Cross-platform interconnection control:
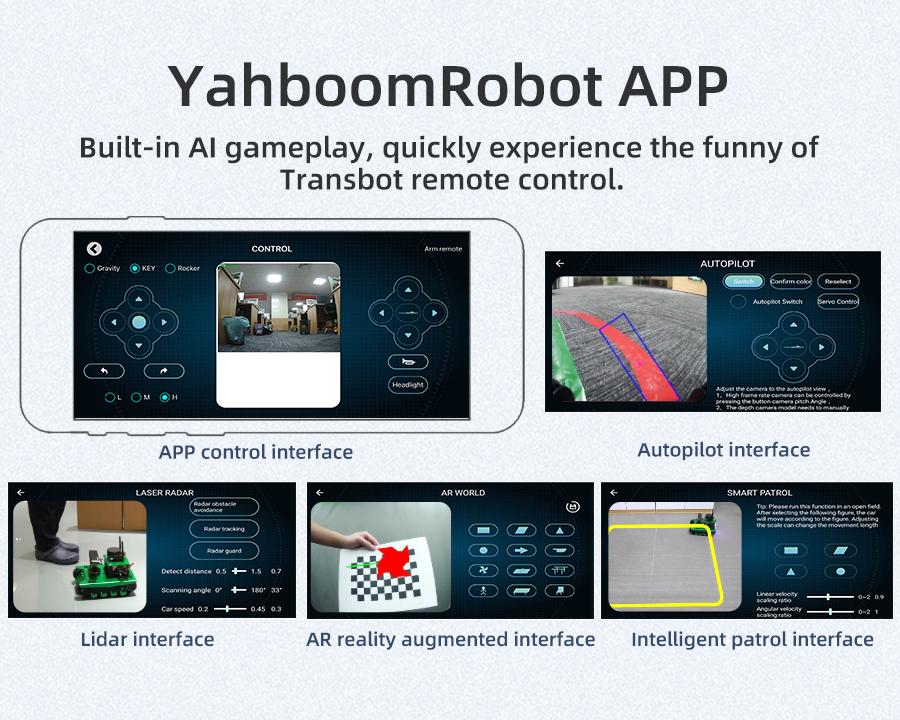
Mobile remote control APP integrated with a variety of AI functions; handle control that can experience the FPV real-time visual effects; JupyterLab online programming and robot operating system control.
Detailed video teaching courses:
We provide 64 video tutorials and detailed documents. Whether you are a beginner or an experienced ROS player, you can easily use this robot.
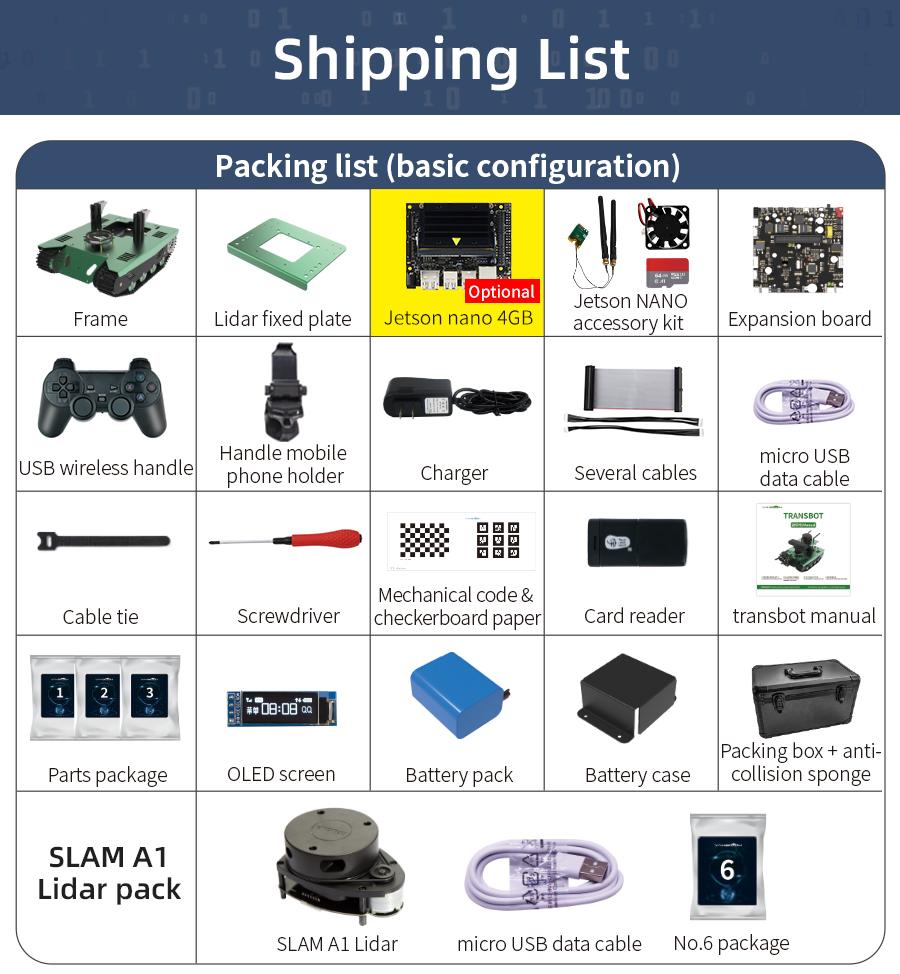
The package contains:
- 1x nVidia Jetson Nano 4GB Subkit
- Aluminium frame;
- Lidar with fixing plate;
- Jetson Nano Accessory Kit;
- Expansion board;
- USB wireless handle;
- Mobile phone support handle;
- Charger;
- Several cables;
- micro USB data cable;
- Cable tie;
- Screwdriver;
- Mechanical code and check board paper ;
- USB card reader;
- Manual;
- Parts package;
- 7 inch screen;
- 7 inch screen fixing bracket
- 7 inch screen support
- Battery pack;
- Battery case;
- Packing box + anti-collision sponge;
- SLAM A1 Lidar;
- HD camera + searchlight;
- HD camera support;
- Several cables;
- Astra Pro depth camera;
- Depth camera support;
- Fixed support for the depth camera;
- 3DOF robotic arm;
- Quick release buckle;
- Quick release buckle fixing plate;
TRANSBOT robot documentation: http://www.yahboom.net/study/Transbot-jetson_nano
Presentation video
Additional information
| Weight | 9 kg |
|---|---|
| Dimensions | 44 × 32 × 31 cm |
Only logged in customers who have purchased this product may leave a review.


Reviews
There are no reviews yet.